FMC/TFM和其他的数据采集类型和成像过程简介
---谢映奎
本文简单介绍TFM中的数据采集和成像。
在高分辨力成像中,常采用的技术之一是FMC/TFM,其中涉及到数据采集和采集后的数据处理(FMC就是一种数据的采集,TFM是信号处理中最广泛使用的一种算法)。
TFM算法基于对信号进行延时和叠加的处理。其基本思想是叠加不连续性处的回波,获取不连续性处最大的幅值。因此,在栅(网)格点处信号合成聚焦,形成图像。成像的结果是幅值图像,如果不同信号的回波相长干涉,则幅值更大。这种方法来源于合成孔径雷达,并且首次用于NDT中的常规检测,比较有名的是SAFT处理技术。
在基于合成聚焦算法的阵列成像中,文献中已经使用了不同名称和首字母缩写的单词来指定这种成像方法。TFM缩写更多的是指代处理算法的本身,与阵列中采用何种数据采集类型无关。这意味着TFM算法可用于多种数据采集的处理,并非只有FMC数据。
TFM算法用于FMC数据处理分为两步:
计算过程:结合声学的几何路径(声束线验证了Snell-笛卡尔定律),计算声时(time of flight)tij(P)。tij(P)= TiP + TjP,其中TiP (或TjP) 是声束从阵元i(或j)的中心连接到阵元P的中心的声时(time of flight)。实际上,阵元尺寸小,使得这个简单的几何模型在实际应用中非常好用。
信号叠加:通过叠加sij (TiP +TjP)信号,计算图像中p点的幅值。每个像素点处的能力通过下述公式计算:
必须注意,除算法的一般形式外,可能存在一些相关的变化:
用于计算声时(time of flight)的数字方案;
实施计划(与检测设备相关的软件和固件不同的版本和优化);
计算栅(网)格的点和相邻点之间的插值;
信号处理后,幅值叠加的可能性;
为A扫对一个图像像素的贡献分配不同的加权因子的选项。
| |
a) 数据采集 | b)数据处理 |
全矩阵采集:N×N个信号sij (t) | 在计算的声时(time of flight)tij(P) ,对捕获的信号进行叠加 |
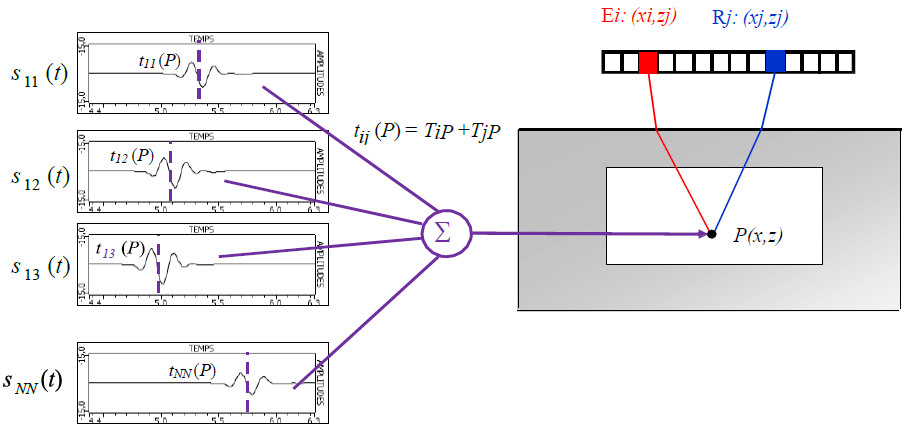

图 1 FMC采集的数据和TFM处理FMC采集的数据
TFM算法中,可能涉及到重构多个成像路径
不连续性可能被不同的成像路径检测(包含尖端衍射,反射,端角反射和波型转换)。
多成像路径TFM的实现包含:
成像路径的选择;
采用两步,计算每个选择的成像路径:
计算阶段:针对选择的成像路径,考虑几何模型处发生的反射和折射,计算声时(time of flight)。
叠加阶段:如上述所述。
处理的结果可以由1个图像显示,或由选择的多个路径分别成像显示。
TFM也可以处理其它采集方案采集到的数据:主要分为两类,一类是采用特定阵元激发;另一类是采用延时,获得虚拟孔径。
1. 阵元的使用
采集不同系列(通常是更少的)的信号,采用与FMC信号处理方法相同的处理方式。其目标是通过减少处理的数据量,实现处理时间的减少,或增加信噪比。
可以考虑三种数据采集的方案:通过使用更少的发射和接收阵元对,采集全矩阵捕获数据的子集。
半矩阵捕获(half matrix capture,HMC):由于发射和接收的互易性,通过减少发射-接收的阵元对,仅仅采集一半的信号。这种技术获得N×(N+1)/2个A扫信号,而(理论上)未丢失所需要的信息。

图 2 半矩阵数据捕获(HMC)(以4个阵元为例进行介绍)
SAFT采集:通过与SAFT技术的类比调用,该方案包括仅获得对应于相同发射和接收的矩阵的信号Sij。实际上,这种技术采用电子扫查,沿阵列方向激发阵元。这种技术将获得N个A扫信号;
稀疏矩阵(sparse matrix capture,SMC):稀疏矩阵通常指按确定或随机的方式选择一系列的激发器和/或接收器,形成一个子阵列。
特殊的矩阵方式。
2. 延时的应用
在发射过程中,为了形成声束,可以使用延时,如下所述:
PWI(Plane Wave Imaging,平面波成像):该技术通过对阵列上的发射阵元施加足够的延时,向工件内部发射不同角度的平面波。采用阵列中的N个阵元对信号进行接收,形成n×N个需要处理的信号(其中n为发射平面波的阵元数,通常n<N)。
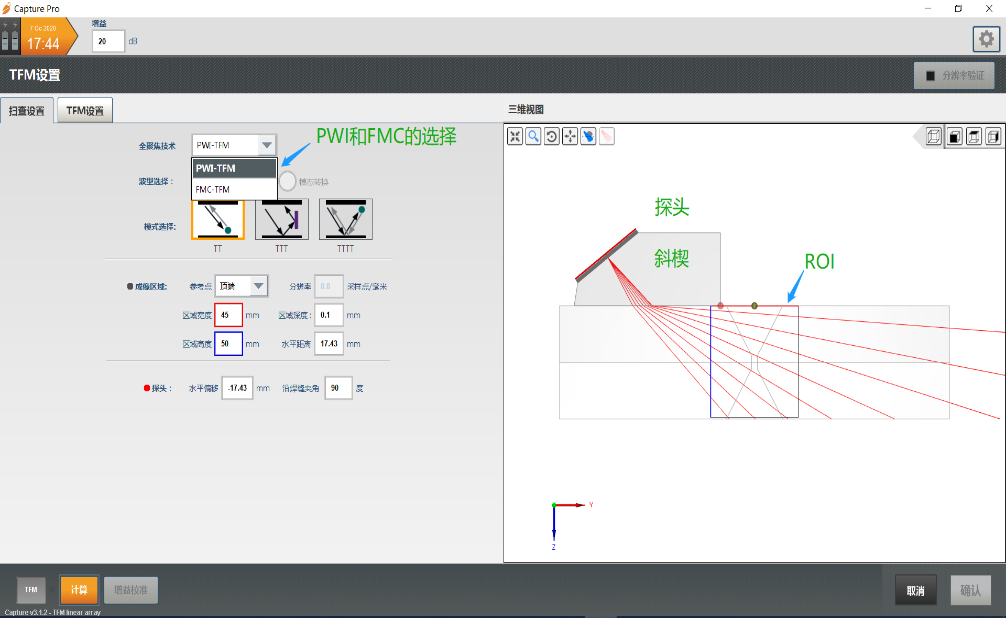
图 3 PWI显示
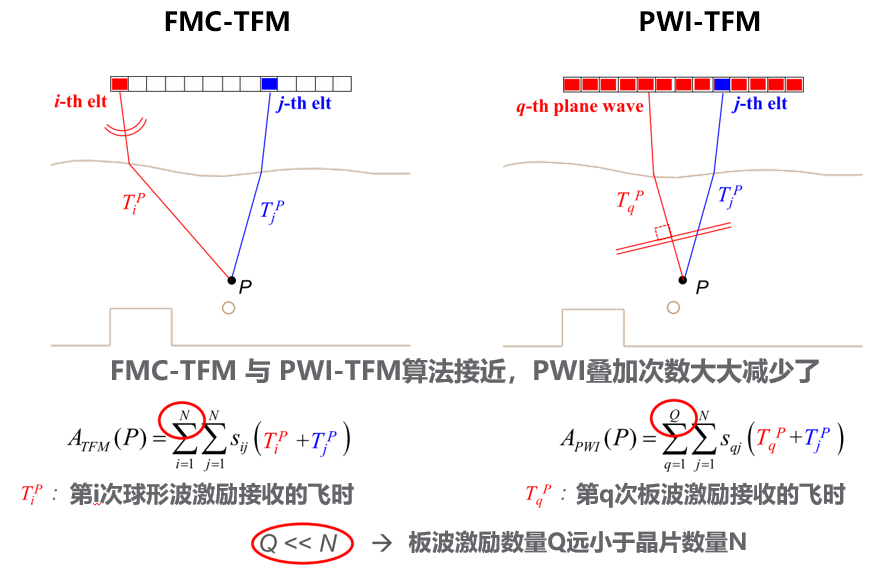
图 4 FMC和PWI的区别
虚拟声源:该技术旨在工件中产生“虚拟声源”,发射比阵列中单个阵元能量更大的声波。其目的是在有噪声的材料中增加SNR。采集包括将阵列划分成有源子孔径,在有源子孔径上应用延时法则,以便将超声聚集在阵列附件的选定点,然后作为“虚拟声源”。每个子孔径对应于一个虚拟声源。一系列的虚拟声源组成虚拟阵列。产生的信号数量为n×N,其中n为阵列中子孔径数量。